* The preview only shows a few pages of manuals at random. You can get the complete content by filling out the form below.
Description
Aplicaţii cu microcontrolere din familia 8051
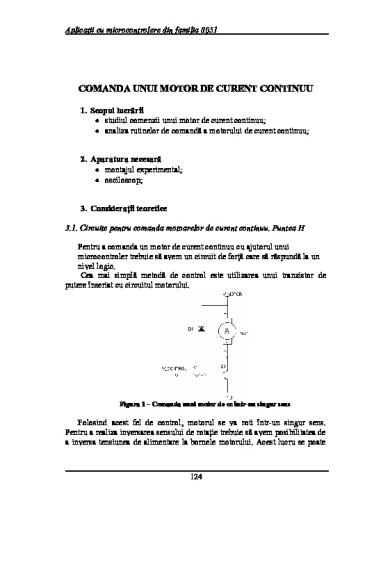
COMANDA UNUI MOTOR DE CURENT CONTINUU 1. Scopul lucrării • studiul comenzii unui motor de curent continuu; • analiza rutinelor de comandă a motorului de curent continuu; 2. Aparatura necesară • montajul experimental; • osciloscop; 3. Consideraţii teoretice 3.1. Circuite pentru comanda motoarelor de curent continuu. Puntea H Pentru a comanda un motor de curent continuu cu ajutorul unui microcontroler trebuie să avem un circuit de forţă care să răspundă la un nivel logic. Cea mai simplă metodă de control este utilizarea unui tranzistor de putere înseriat cu circuitul motorului.
Figura 1 – Comanda unui motor de cc într-un singur sens
Folosind acest fel de control, motorul se va roti într-un singur sens. Pentru a realiza inversarea sensului de rotaţie trebuie să avem posibilitatea de a inversa tensiunea de alimentare la bornele motorului. Acest lucru se poate
124
Comanda unui motor de curent continuu realiza cu ajutorul unei punţi H. Puntea H conţine patru elemente comutatoare dispuse ca în figura 2. V+
SW1
SW4
1
2
M
SW2
SW3
GND
Figura 2 – Puntea H
În această configuraţie, putem avea următoarele situaţii: SW1 SW2 SW3 SW4 Starea motorului 0 0 0 0 Oprit 1 0 1 0 Sens 1 0 1 0 1 Sens 2 1 1 0 0 Nepermis, scurtcircuit 0 0 1 1 Nepermis, scurtcircuit 1 0 0 1 Frânare dinamică 0 1 1 0 Frânare dinamică Figura 3 – Modalităţi de comandă pentru puntea H
Motorul va fi pornit când una din perechile SW1-SW3 sau SW2-SW4 vor fi cuplate. V+
V+
SW1
SW4 (+)
1
M
SW2
2
SW1
(-)
SW4 (-)
SW3
1
M
2
(+)
SW2
SW3
GND
GND
Figura 4 – Inversarea sensului de rotaţie al motorului
După cum se observă din figura 4, dacă SW1 şi SW3 sunt cuplate, polul 1 al motorului va fi conectat la V+ şi polul 2 la GND, imprimând o mişcare 125
Aplicaţii cu microcontrolere din familia 8051 de rotaţie de un anumit sens. Dacă se cuplează SW2 şi SW4, polul 1 al motorului se va conecta la GND iar polul 2 la V+, rotaţia realizându-se în sens contrar. 3.2. Comanda PWM Dacă în circuitul de comandă al motorului elementul comutator este cuplat permanent, motorul va efectua o rotaţie la viteza maximă, impusă de tensiunea de alimentare. Pentru a controla viteza de rotaţie a motorului, trebuie să controlăm tensiunea la bornele acestuia. O primă metodă ar fi controlul liniar, adică folosirea unui element regulator pe care să impunem o cădere de tensiune egală cu diferenţa dintre tensiunea de alimentare si tensiunea ce se doreşte pe motor. A doua metodă este controlul în impulsuri modulare în durată (PWM, Pulse Width Modulation). Această metodă presupune aplicarea unor impulsuri cu frecvenţă fixă şi de durată variabilă la bornele motorului. T T_off
T_on
D=20%
A
D=50% D=80% Figura 5 – Semnalul PWM
Bazându-ne pe efectul integrativ al motorului, putem spune că acesta va vedea doar componenta continuă a semnalului PWM. Această componetă se poate exprima ca fiind produsul dintre amplitudinea semnalului PWM şi factorul de umplere al acestuia. T _ on U Motor = A * D = A * T
Unde: A – amplitudinea semnalului PWM
126
Comanda unui motor de curent continuu D – factorul de umplere T_on – timpul de conducţie T – perioada semnalului Avantajul evident al acestei metode constă în faptul că elementele de comandă SW1-SW4 lucrează în regim de comutaţie (saturat – blocat), deci cu randament maxim. Pentru realizarea comenzii PWM cu ajutorul unui microcontroler, trebuie să stabilim perioada semnalului PWM şi un număr de paşi (cuante) pentru reglajul factorului de umplere. T
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Figura 6 – Modalitatea de implementare a PWM digital
Fixând un număr de K eşantioane şi amplitudinea A, notând cu N numărul de eşantioane ce reprezintă timpul de conducţie, putem scrie: N U Motor = A * K Pentru implementarea acestui tip de control vom avea nevoie de o bază T de timp cu intervalul , ce reprezintă perioada unei cuante PWM. Folosind K această bază de timp, vom acţiona elementele de comandă pe durata cuantelor de la 1 la N şi le vom inhiba pe durata N+1 la K. În cazul particular din figura 6 avem K=16 şi N=9. Schema logică pentru realizarea PWM-ului este ilustrată în figura 7. Variabila Contor este utilizată pentru a baleia ciclic cuantele aferente unei perioade. Astfel, ea va lua valori între 1 şi K, incrementându-se după fiecare parcurgere a buclei. Dacă valoarea din variabila Contor devine mai mare decât K spunem că am completat o perioadă a semnalului de ieşire. În acest moment resetăm contorul la valoarea iniţială, 1 şi citim valoarea variabilei N, care reprezintă factorul de umplere şi se poate modifica din exteriorul buclei.
127
Aplicaţii cu microcontrolere din familia 8051 START Initializam K, N 1 Contor = 1 2 Eveniment baza de timp?
DA
Contor <= N
Iesire = 1
NU
Iesire = 0
Contor = Contor+1
DA Citeste N
NU Contor > K
2
1
Figura 7 – Schema logică pentru implementarea PWM
3.3. Montajul experimental Montajul experimental este reprezentat de o punte H realizată cu tranzistoare MOS, comandate în grilă de câte un buffer inversor cu drenă în gol, de tip 74HC06 (figura 14). Puntea dispune de două intrări pentru cele două sensuri de rotaţie ale motorului. Comanda punţii realizându-se cu un microcontroler din familia 8051 a cărui ieşiri sunt în stare logică 1 la pornire, intrările se vor alege active în 0, pentru a evita comanda simultană a acestora în momentul punerii sub tensiune a montajului. În plus, intrările bufferelor inversoare sunt prevăzute cu rezistenţe de pull-up pentru a păstra nivelul logic 1 la intrare chiar în cazul decuplării microcontrollerului. Controlul turaţiei şi sensului de rotaţie se face cu ajutorul unei tastaturi matriciale de 3 rânduri şi 3 coloane. Se vor defini 4 taste pentru mărirea/micşorarea vitezei şi pentru sensurile stânga/dreapta.
128
Comanda unui motor de curent continuu
3.4. Descrierea programului Programul realizează comanda PWM a motorului de curent continuu în 32 cuante, cu o frecvenţă de 100Hz şi scanarea tastaturii cu o frecvenţă de 10Hz. Pentru a obţine baza de timp necesară implementării PWM-ului vom folosi timerul 0. Vom calcula cea mai mică periodă de timp de care avem nevoie, restul bazându-se pe multiplul acesteia. Aceasta este cea necesitată pentru PWM, şi se va calcula ţinând cont de frecvenţa semnalului PWM şi numărul de cuante:
TK =
1 f PWM * K
Unde: TK – perioada unei cuante FPWM - frecvenţa K – numărul de cuante Înlocuind cu valorile de mai sus, obţinem TK=312,5μs Folosind un tact de 11.0592MHz pentru microcontroler, vom calcula valoarea de reîncărcare a timerului 0 pentru a obţine TK=312,5μs. Durata unui ciclu maşină fiind de 12 tacţi, adică 1,085μs, putem scrie: T ⎛ 312,5 ⎞ TH 0, TL0 = 65635 − K = 65535 − int ⎜ ⎟ = 65535 − 288 = 65247 TCY ⎝ 1,085 ⎠ Împărţind valoarea pe cei doi regiştri pe 8 biţi şi facând transformările: TH 0 = 0 xFE TL0 = 0 xDF Având fixată baza de timp, vom folosi întreruperea aferentă timerului 0 pentru a lua o decizie referitoare la starea ieşirii după trecerea fiecărui interval de 312,5μs, conform figurii 6. Tastatura folosită este una de tip matricial cu 9 taste. Aceasta se va conecta la microcontroler prin intermediul a 6 pini de port, dintre care 3 se vor folosi pentru scanarea tastaturii şi 3 pentru citirea valorii returnate. Cei 6 pini vor fi alocaţi din portul P2, alături de semnalele PWM pentru comanda motorului, ca în tabelul de mai jos: Bit 7
Bit 6
Coloana Coloana 3 2
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Coloana 1
Linia 3
Linia 2
Linia 1
PWM Dir 1
PWM Dir 0
Figura 8 – Alocarea pinilor portului P2
129
Aplicaţii cu microcontrolere din familia 8051 Cele nouă taste vor fi dispuse ca în figura 9. Dintre acestea, se vor folosi tasta 2, pentru incrementarea vitezei motorului, tasta 5 pentru decrementarea vitezei motorului, tasta 4 şi 6 pentru cele a impune direcţia de rotaţie.
“1” 0xD8
“2” 0xB8
“3” 0x78
“4” 0xD4
“5” 0xB4
“6” 0x74
“7” 0xCC
“8” 0xAC
“9” 0x6C
Figura 9 – Codurile de scanare pentru tastatură
Scanarea tastaturii se va face pe linii, cu un semnal ca cel din figura 10. T1 T2
Linia 1
Linia 2
Linia 3
Figura 10 – Semnalul pentru scanarea tastaturii
Aici T1 este perioada de scanare, pentru frecvenţa fixată mai sus, de 10Hz, aceasta va fi de 100ms, iar T2 este perioada în care se citeşte o tastă apăsată pe linia în curs de scanare. Observăm că T2 = T1/3 = 33.33ms. Pentru a obţine acest interval de timp, vom folosi baza de timp de 312,48μs. Astfel, vom executa scanarea tastaturii la aproximativ 100 de cicli de bază de timp. După fiecare interval de timp egal cu T2, se va modifica starea pinilor de port P2.4, P2.3, P2.2, conform cu valorile exprimate în figura 3.5.2. Se va avea în vedere faptul că pinii P2.7, P2.6 şi P2.5 vor fi în stare “1” logic, pentru a le folosi ca şi intrare, iar valoarea de pe pinii P2.1 şi 130
Comanda unui motor de curent continuu P2.0 trebuie să rămână nealterată, datorită faptului că acestea sunt ieşirile de PWM. ;DCMotor.a51 $NOMOD51 $INCLUDE (reg52.inc) NAME DCMOTORCONTROL ;************************************************************* ;Definiri stivă, variabile pe octeţi si pe biţi ;************************************************************* STIVA SEGMENT IDATA RSEG STIVA DS 10 ;CONSTANTE SEGMENT CODE ; RSEG CONSTANTE ; VARIABILE SEGMENT DATA RSEG VARIABILE CurrentVal: DS 1 ;Contor pentru iesirea PWM KbdScanCount: DS 1 ;Contor temporizare scanare tastatură Kbd_RowScan: DS 1 ;Contor scanare linii Duty: DS 1 ;Factorul de umplere KeyToDebounce: DS 1 ;Val. temp. pentru tasta citită KeyPressed: DS 1 ;Valoare tastă citită PortMask: DS 3 FLAGURI
SEGMENT BIT RSEG FLAGURI DebounceFlag: DBIT 1 Dir: DBIT 1 KeyPressed_Flag: DBIT 1 ;************************************************************* ;Inceput rutina principala ;************************************************************* CSEG AT 0 ;Adresa de început a codului USING 0 ;Folosim bancul de regiştri 0 LJMP START ;Salt la bucla principală PROGRAM SEGMENT CODE RSEG PROGRAM USING 0 start: 131
Aplicaţii cu microcontrolere din familia 8051 mov lcall
sp, #STIVA-1 InitApp
;Iniţializăm stiva ;Apel rutină iniţializări ;Începem bucla principală ;Verificăm dacă e tastă apasată
lcall mov jz lcall mov clr subb jz
KeyDown a, r7 main ReadKey a, r7 c a, #0B8h Tasta_UP
mov clr subb jz
a, r7 c a, #0B4h Tasta_Down
;
mov clr subb jz
a, r7 c a, #0D4h Tasta_Sens_1
;
mov clr subb jnz
a, r7 c a, #074h main
main:
Tasta_Sens_2: jb cpl jmp Tasta_Sens_1: jnb cpl jmp Tasta_Up: mov clr subb jnc
inc
;Apelăm funcţia din nou
;Tasta nr. 2? /Inc. viteză ;
;Tasta nr. 5? /Dec. viteză ;
;Tasta nr. 4 /Schimbare direcţie ;
;Tasta nr. 6? /Schimbare direcţie ;Dacă s-a apăsat tasta Sens 2 ;E setat deja sensul? ;Dacă nu, setăm sensul
Dir, main Dir main
;Dacă s-a apăsat tasta Sens 1 ;E setat deja sensul? ;Dacă nu, setăm sensul
Dir, main Dir main
;Dacă s-a apăsat tasta inc. viteză a, Duty c a, #31 main
;Verificăm limita superioară ;Dacă suntem la limita sup. ;nu luăm nici o măsura ;În caz contrar incr. viteza
Duty 132
Comanda unui motor de curent continuu jmp
main
mov jz dec jmp
a, Duty main Duty main
;S-a apăsat tasta decr. viteză?
Tasta_Down:
;Verificăm dacă nu suntem la 0 ;Dacă nu, decrementăm viteza
ljmp main ;Sfârşit buclă principală ;************************************************************* ;Sfârşit rutină principală ;************************************************************* ;Început bloc rutine de întrerupere ;************************************************************* ;Început rutină de întrerupere pentru Timer 0 CSEG AT 0Bh ;adresa rutinei de întrerupere TMR0 ljmp TMR0_Handler TMR0_Handler SEGMENT CODE RSEG TMR0_Handler USING 1 push mov push ;început cod user mov mov mov clr subb jc jmp T0_CheckDir: jnb T0_OutActive_0: clr setb jmp T0_OutActive_1: setb
psw psw, #80h acc
;salvăm PSW pe stivă ;comutăm în bancul 1 ;salvăm acumulatorul
th0, #0FEh tl0, #0DFh
;reîncărcăm timerul
a, CurrentVal c a, Duty T0_CheckDir T0_OutIdle
;verificăm PWM activ/inactiv ;dacă e activ, verificăm direcţia ;dacă nu, setăm stările inactive
Dir, T0_OutActive_1 P2.0 P2.1 T0_NextPWM ;
;dacă direcţia e 0, ;setăm ieşirea activă ;pentru portul P2.0 ;dacă direcţia e 1, ;setăm ieşirea activă
P2.0 133
Aplicaţii cu microcontrolere din familia 8051 clr jmp
P2.1 T0_NextPWM
;pentru PWM inactiv ;setăm ambele ieşiri ;inactive
T0_OutIdle:
setb setb T0_NextPWM: mov clr subb jc mov jmp T0_IncPWMCnt: inc T0_KbdScan: djnz T0_DbFlagTrue: mov jnb clr mov anl clr subb jnz mov setb jmp T0_DbFlagFalse: mov anl xrl jz mov anl mov
;pentru portul P2.1
P2.0 P2.1 a, CurrentVal c a, #31 T0_IncPWMCnt CurrentVal, #0 T0_KbdScan
; capăt de perioadă PWM ;reluăm ciclul
CurrentVal
;trecem la următorul eşantion ;ciclu scanare tastatură KbdScanCount, T0_Exit ;temporizare citire tastatură KbdScanCount, #100 ;capăt interval de temporizare? ;reîncărcăm DebounceFlag, T0_DbFlagFalse ;ciclu de verificare? DebounceFlag ;ştergem flagul de verificare a, P2 a, #0FCh ;citim tasta c a, KeyToDebounce ;o comparăm cu ce s-a citit T0_DbFlagFalse ; nu corespunde? KeyPressed, KeyToDebounce ;dacă da, o memorăm KeyPressed_Flag ;si setăm flagul de tastă validă T0_Exit ;părăsim rutina de întrerupere a, P2 a, #0E0h a, #0E0h T0_KeyNotPressed a, P2 a, #0FCh KeyToDebounce, a
setb DebounceFlag jmp T0_Exit T0_KeyNotPressed: 134
;dacă e ciclu de citire ;citim tastatura ;şi verificăm dacă e tastă apasată ;dacă nu, scanăm în continuare ;dacă da, ;citim tasta ;o memorăm, pentru a fi ;verificată ;setăm flagul de verificare ;părăsim rutina de întrerupere
Comanda unui motor de curent continuu mov add mov mov orl anl mov inc mov xrl jnz mov
a, #PortMask a, Kbd_RowScan r0, a a, P2 a, #0FCh a, @r0 P2, a Kbd_RowScan a, Kbd_RowScan a, #3 T0_Exit Kbd_RowScan, #0
mov
r7, #0
;vom seta masca pentru scanare ;în fcţ. de linia care va fi citita ;mascăm ieşirile de PWM ;setăm portul la valoarea măstii ;pregătim linia următoare ;dacă linia scanată e ultima
;revenim la T0_Exit: ;SFÂRŞIT COD USER pop acc ;refacem acc. de pe stivă pop psw ;refacem PSW de pe stivă reti ;Sfârşit rutină de întrerupere pentru Timer 0 ;Sfârşit bloc rutine de întrerupere ;************************************************************* ;Început Bloc Rutine Utilizator InitApp: ;Rutină pentru iniţializarea aplicaţiei mov tmod, #0F1h ;Config Timer 0 mov th0, #0FEh ;Incărcăm TMR0 mov tl0, #0DFh ;celor 312,48us pentru PWM setb tr0 ;Pornim timerul 0 setb et0 ;Pornim întreruperea aferentă TMR0 setb ea ;Pornim întreruperile mov a, #0EFh ;Setăm val. măştii de scanare pt. mov P2, a ;prima linie mov Duty, #3 ;Factor de umplere impl. mov PortMask+0, #0EFh ;Definim valorile măştilor mov PortMask+1, #0F7h ;de scanare mov PortMask+2, #0FBh ;pentru cele trei linii mov Kbd_RowScan, #0 ;iniţ. contorul pentru scanare mov KbdScanCount, #0 ;temporizarea pentru scanare mov CurrentVal, #0 ;iniţ. contorul pentru PWM ret KeyDown:
;Rutină pentru verif. tastă apăsată ;Implicit returnăm valoarea 0 135
Aplicaţii cu microcontrolere din familia 8051 jnb mov KeyDown_Ret: ret
KeyPressed_Flag, KeyDown_Ret ;Dacă e tastă apasată r7, #1 ;Returnăm valoarea 1
;Rutină citire tastă ;Returnăm valoarea tastei ;Ştergem flagul de tastă validă
ReadKey:
mov r7, KeyPressed clr KeyPressed_Flag ret ;************************************************************* ;Sfârşit Bloc Rutine Utilizator ;************************************************************* END
136
Comanda unui motor de curent continuu
3.5. Schema logică a programului START
Initializare aplicatie
Citire flag tasta apasata
NU
Tasta apasata? DA DA
DA Tasta = Incrementare?
Duty <31 NU
NU Tasta = Decrementare ?
Duty = Duty + 1
DA
DA Duty > 0
Duty = Duty -1 NU
NU Tasta = Directie 1 ?
DA Dir = !Dir
NU NU
Tasta = Directie 2 ?
DA
Figura 11 – Schema logică a programului principal
137
Aplicaţii cu microcontrolere din familia 8051 START ISR
Reîncarcare Timer0
CurrentVal < Duty
NU
P2. 0 = 1 P2. 1 = 1
DA DA
NU
Dir = 0
P2. 0 = 0 P2. 1 = 1
P2. 0 = 1 P2. 1 = 0
CurrentVal= CurrentVal+ 1 NU CurrentVal < 32
CurrentVal= 0
DA KbdScanCount= KbdScanCount- 1
KbdScanCount =0
NU
1
DA KbdScanCount= 100
2
Figura 12 – Schema logică a vectorului de întrerupere (partea 1)
138
Comanda unui motor de curent continuu
2
NU
Tasta citita ? DA
DA
DebounceFlag =1
DebounceFlag= 0
NU
NU
KeyToDebounce = Tasta citita
Tasta citita = KeyToDebounce DA KeyPressed= KeyToDebounce
DebounceFlag= 1
KeyPressed_Flag =1
1
1
P2 = PortMask[Linie]
Linie = Linie+1
Linie < 3 1
NU
Linie = 0
DA
STOP ISR
Figura 13 – Schema logică a vectorului de întrerupere (partea 2)
139
Aplicaţii cu microcontrolere din familia 8051
4. Modul de lucru • Se va rula codul pas cu pas, utilizând depanatorul de programe inclus în Keil µVision2; • Se vor vizualiza cu ajutorul osciloscopului formele de undă pentru comanda motorului, la diferite valori ale factorului de umplere; • Se vor vizualiza formele de undă pentru scanarea tastaturii. 5. Prelucrarea datelor • Să se modifice programul, astfel încât PWM-ul generat să aibă o frecvenţă de 50Hz cu 64 paşi, iar tastatura să se scaneze cu o frecvenţă de 15Hz. • Să se modifice maparea tastelor, astfel încât tastele pentru incrementarea/decrementarea vitezei să fie 3 respectiv 4, iar cele pentru direcţie să fie 8 şi 9. • Să se propună un algoritm de schimbare lentă a sensului de rotaţie.
140
Comanda unui motor de curent continuu
Figura 14 – Schema montajului experimental
141