* The preview only shows a few pages of manuals at random. You can get the complete content by filling out the form below.
Description
CHAPITRE III
ELASTOPLASTICITE DES SYSTEMES DE BARRES EN FLEXION
81
82
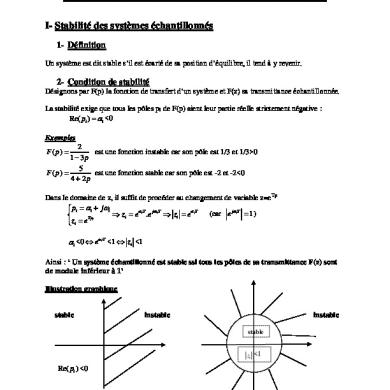
1. Calcul élastoplastique d’une poutre console sous charge concentrée Une poutre de longueur 2l, encastrée à son extrémité O et en appui simple au point B, est soumise à une charge verticale concentrée d’intensité Q, appliquée en son milieu A, que l’on fait croître progressivement à partir d’une valeur initiale nulle. La figure 1 montre l’allure générale, affine par morceaux, d’un diagramme de moments fléchissants statiquement admissible pour le problème. Il dépend de la réaction d’appui Y au point B, que l’on peut prendre comme inconnue hyperstatique du problème (structure hyperstatique d’ordre 1). Il vient alors immédiatement : Y (2l x) Q(l x) si 0 x l M ( x) Y (2l x) si l x 2l
(3.1)
Yl y
O
Q
l
B
l
A
x
Y
( 2Y Q )l Figure 1. Diagramme de moments fléchissants statiquement admissibles pour une poutre sous charge concentrée Dans le cadre de la modélisation «poutre», la loi de comportement est du type momentcourbure. Partant de la résolution du problème d’évolution élastoplastique pour un élément de poutre, effectuée au chapitre II-section 4, on adoptera une schématisation simplifiée, de type élastique parfaitement plastique, du diagramme de la figure 13 de ce chapitre (figure 2), dans laquelle le comportement de l’élément de poutre demeure élastique tant que le moment de flexion est inférieur à la valeur limite M l . Le tableau ci-après récapitule les différents cas rencontrés selon les valeurs de M et M , dans l’hypothèse où la valeur du moment limite est la même en flexion positive et négative. Il apparaît notamment que, en raison du fait que dans le cas de la charge plastique M 0 , le taux de courbure est purement plastique, avec le même signe que celui du moment de flexion.
83
M
Ml Me
EI z
Figure 2. Schématisation simplifiée de la loi de comportement «moment-courbure» d’une poutre en flexion élastoplastique
M
M l M M l M M l
M M
e M / EI z
M 0
e M / EI z
M 0
M / EI z p 0
M 0
e M / EI z
M 0
M / EI z p 0
0
l
0
1.1. Phase de comportement élastique Partant d’un état initial ( Q 0 ) naturel (diagramme de moments nul) on augmente progressivement la valeur du chargement. Le comportement de la poutre est alors en tout point élastique, soit : x 0,2l
M ( x) EI z ( x) EI z
d 2v ( x) dx 2
(3.2)
où v(x) désigne la flèche au point x, comptée positivement dans le sens de l’axe Oy, le moment fléchissant M(x) étant positif selon le sens de l’axe Oz. La procédure de résolution directe de ce problème est classique. Elle consiste à intégrer à deux reprises l’équation (3.2) où l’on tient compte de (3.1), et à exprimer les différentes conditions aux limites :
84
dv ( x 0) 0 dx
encastrement en O :
v( x 0)
appui simple en B :
v( x 2l ) 0
(3.3(a)) (3.3(b))
ainsi que la condition de continuité de la flèche et de la rotation au point A : v( x l ) v( x l ) ,
dv dv (x l ) (x l ) dx dx
(3.4)
Le diagramme des moments fléchissants solution est alors après calculs (figure 3) :
Y
5Q 16
Q 11 8 2 x 3l si 0 x l M ( x) 5 Q (2l x) si l x 2l 16
(3.5)
tandis que la flèche en tout point a pour expression : Qx 2 11x-18l si 0 x l 96EI z v( x) 2 Qx 2l x 5 x 2 20lx 8l 2 si l x 2l 96EI z
(3.6)
5Ql / 16
Q O
A
B
q 7Ql 3 / 96EI z
Y 5Q / 16
3Ql / 8
Figure 3. Diagramme de moments fléchissants et déformée de la structure dans la phase de comportement élastique d’où en particulier le déplacement q du point d’application de la charge (compté positivement dans le sens des y négatifs) :
85
q v ( x l )
7Ql 3 96EI z
(3.7)
Cette solution reste valable tant que M ( x) M l x 0,2l , c’est-à-dire compte tenu de (3.5), tant que le moment à l’encastrement O est supérieur à M l . La limite d’élasticité qui correspond à la plastification en flexion négative à l’encastrement est donc égale à : M ( x 0) 3Ql / 8 M l Q e
8M l 3l
(3.8)
le déplacement correspondant valant : q e q (Q Q e )
7M l l 2 36EI z
(3.9)
Remarque. L’analyse de la structure en phase élastique, faite ici par l’approche directe, peut être réalisée de manière totalement équivalente en recourant au théorème du potentiel minimum pour le calcul de l’inconnue hyperstatique (équation (3.5)) et au théorème de Castigliano pour le calcul de la flèche q (équation (3.7)). 1.2. Phase élastoplastique ; notion de rotule plastique Le chargement étant poursuivi au-delà de la limite d’élasticité, on peut tout d’abord penser à faire l’hypothèse d’une zone plastique se propageant à partir de l’encastrement, c’est-à-dire que le moment limite en flexion négative serait atteint sur un intervalle de la forme 0, x0 : M ( x) M l 0 x x0
(3.10)
Or une telle hypothèse ne peut convenir, car le diagramme de moments de la forme (3.10) qu’elle implique ne peut être statiquement admissible, c’est-à-dire de la forme (3.1). On propose alors une solution alternative consistant à admettre que seule la section située à l’encastrement O reste plastifiée, le reste de la structure demeurant élastique. Compte tenu des conditions d’équilibre, le diagramme de moments est alors nécessairement de la forme (figure 4) : M l Q M l / l x / 2 Q Q e : M ( x) Q M l / l (2l x) / 2
86
0 xl
(3.11) l x 2l
La déformation (courbure) plastique, localisée au seul encastrement, est nécessairement de la forme : p ( x) p 0 ( x) (3.12)
(M l Ql ) / 2 rotule plastique
Q B
O A
Y (Q M l / l ) / 2
M ( x 0) M l p dv / dx( x 0) v (x )
Figure 4. Diagramme des moments et déformée de la structure en phase élastoplastique où 0 désigne la distribution de Dirac au point x=0, tandis que p représente la discontinuité de rotation purement plastique (et donc totale puisqu’il n’y pas de discontinuité de rotation élastique), en ce même point (figure 4), qui vaut alors : dv
dv
dv
p ( x 0) ( x 0 ) ( x 0 ) dx dx dx
(3.13)
Il en résulte que le champ de déformation de courbure totale s’écrit : d 2v M ( x) ( x) e ( x) p ( x) p 0 ( x ) 2 dx EI z
(3.14)
et donc le champ de rotation, obtenu par intégration de (3.14), en tenant compte de (3.11) : dv ( x) p H ( x) dx M l x Q M l / l x 2 / 4 1 EI z M l l Q M l / l l 2 / 4 (Q M l / l ) ( x l )( x 3l ) / 4
87
0 xl l x 2l
(3.15)
où H(x) désigne la fonction d’Heaviside ( H ( x 0) 0, H ( x 0) 1). La déformée de la structure (figure 4) est obtenue par intégration de (3.15) en tenant compte de la condition v( x 0) 0 . On obtient ainsi tous calculs faits : v( x) p x (3.16) M l x 2 / 2 Q M l / l x 3 / 12 1 l 2 l 3 l EI z M l / 2 Q M / l l / 12 M l ( x l ) (Q M l / l )l 2 ( x l ) / 4 (Q M l / l ) x l 2 ( x 4l ) /12
0 xl
l x 2l
En exprimant alors que la flèche est nulle au point B ( x 2l ) , il vient : v( x 2l ) p 2l
1 4 M l l 2 / 3 Ql 3 / 3 0 EI z
(3.17)
d’où la valeur de la discontinuité de rotation plastique à l’encastrement
p
l2 l2 8M l / 3l Q Qe Q 4 EI z 4 EI z
(3.18)
Cette dernière relation permet de montrer que la règle d’écoulement plastique est bien vérifiée au niveau de la rotule plastique (rotule plastique «négative»), puisque : M M l , M 0
p
l2 Q0 4 EI z
(3.19)
Q Qll 32M Ml l //ll Q
Q e 8M l / 3l
q
Figure 5. Courbe charge-déplacement
88
Dans cette phase de comportement élastoplastique, l’expression du déplacement du point d’application de la charge s’écrit : l2 q v ( x l ) EI z
Ql M l l3 Q Qe qe 4 6 EI z 6
(3.20)
qui correspond au second segment de droite de la courbe charge-déplacement représentée sur la figure 5. 1.3. Charge limite et mécanisme de ruine plastique La solution mise en évidence dans la phase de comportement élastoplastique demeure valable tant que le point A où le moment est maximal reste élastique, soit : ( M l Ql ) / 2 M l
Q Ql 3
Ml l
(3.21)
Cette valeur du chargement ne peut être dépassée. En effet, un diagramme de moments fléchissants statiquement admissible avec une valeur Q du chargement est de la forme (3.1). Il respecte le critère de plasticité en tout point de la structure si et seulement si les moments extrêmes aux points O et A satisfont ce critère :
Yl M l et
2Yl-Ql M l
(3.22)
Ml y
O
Q Q l 3M l / l
p 0
B
A Y M l /l
Ml
2 p 0
Figure 6. Diagramme des moments associé à la charge limite et mécanisme de ruine plastique Il est alors facile de voir que les deux inégalités précédentes ne peuvent être simultanément satisfaites si Q Ql 3M l / l . En d’autres termes il n’est pas possible d’équilibrer une valeur du chargement strictement supérieure à Q l par une distribution de moments fléchissants qui respecte le critère de plasticité. Il s’agit encore une fois d’un raisonnement de calcul à la rupture fondé sur
89
l’examen de la compatibilité entre les conditions d’équilibre de la poutre, se traduisant par l’expression (1) du diagramme des moments, et le respect d’un critère de résistance. Q Q l constitue la charge limite de la structure. Maintenant le chargement à cette valeur :
Ml , Q 0 l la distribution correspondante des moments fléchissant est : Q Ql 3
M l 2 x / l 1 si 0 x l M ( x) M l 2 x / l si l x 2l
(3.23)
(3.24)
Elle correspond à la plastification en flexion négative de la section O (encastrement) et en flexion positive de la section A située au point d’application de la charge (figure 6). Puisque le diagramme des moments reste constant ( M 0 en tout point) les taux de déformation de courbure sont purement plastiques, donc nulles en dehors des points O et A où le critère de plasticité est atteint. Ces sections sont le siège de rotules plastiques, négative en O et positive en A compte tenu de la loi de comportement. La compatibilité géométrique implique que les taux de discontinuités de rotation plastiques en ces points sont reliées entre elles : p 0 en O et 2 p 0 en A. Le mécanisme de ruine plastique correspondant est représenté sur la figure 6 : il s’agit d’un «mécanisme de poutre» dans lequel les deux moitiés de la structure sont animées de mouvements de rotation de vitesses respectives p et p . Cette phase d’écoulement plastique libre est associée au palier horizontal de la courbe charge-déplacement de la figure 5. 1.4. Phase de décharge et état résiduel Partant de l’état où la section A vient juste d’entrer en plasticité, on effectue une décharge que l’on suppose élastique. Le diagramme des moments résiduels (figure 7(c)) qui correspond à la décharge totale de la structure, est alors obtenu en superposant au diagramme associé à la charge limite (figure 7(a)) celui correspondant à un calcul purement élastique où Q Q l (figure 7(b)). Il vient alors compte tenu des expressions (3.5) des distributions de moments en phase élastique, écrites pour Q 3M l / l , et de (3.24) l 3M l 11 M 2 x / l 1 x 3l si 0 x l l M 8l 2 1 x / 2l M r ( x) l 8 15 M l M 2 x / l (2l x) si l x 2l 16l
90
(3.25)
Une telle distribution de moments résiduels est autoéquilibrée, c’est-à-dire de la forme (3.1) avec Q 0 et Y r M l / 16l . On observe encore une fois que ce sont ces efforts résiduels qui, par le biais des déformations élastiques qu’ils engendrent, rétablissent la compatibilité géométrique des déformations plastiques acquises par la structure dans sa phase de chargement.
Ml Q Q l 3M l / l (a )
O
Ml
9M l / 8
Q Q l (b)
O
15M l / 16
M l /8
M l / 16
(c ) O
Figure 7: Décharge élastique totale et diagramme de moments résiduels Cette observation est illustrée sur la figure 8. Le champ des déformations plastiques s’écrit en effet :
p ( x) p (Q Q l ) O ( x)
(3.26)
avec d’après (3.18) :
p (Q Q l )
M ll 12EI z
(3.27)
de sorte qu’en intégrant deux fois par rapport à x et en tenant compte des conditions aux limites à l’encastrement v( x 0) dv / dv( x 0 ) 0 , l’expression de la flèche résiduelle, notée v p , s’écrit: 91
v p ( x) p (Q l ) x
(3.28)
On voit donc que le champ (3.26) est bien intégrable, mais que la distribution de flèche dont il dérive n’est pas géométriquement compatible, car ne respectant pas la condition d’appui en x 2l (figure 8(a)). En revanche, si l’on superpose à v p la flèche élastique associée à la distribution de moments résiduels (3.25) égale à (figure 8(b)) : v el ( x)
Yr Ml lx 2 x 3 / 6 lx 2 x 3 / 6 EI z 16lEI z
(3.29)
la distribution de flèche résiduelle (figure 8(c)) s’écrit : v r ( x) v p ( x) v el ( x)
M ll Ml Ml x x lx 2 x 3 / 6 (2l x) 12EI z 16lEI z 96EI z l
(3.30)
On voit donc qu’elle est bien géométriquement compatible puisque v r ( x 0) v r ( x 2l ) 0
(a )
(3.31)
p (Q l )
v p (x)
M r (x)
Yr el
v (x)
(b)
M r (x)
(c ) v r (x )
Yr
Figure 8: Interprétation des moments résiduels comme rétablissant la compatibilité géométrique des déformations plastiques
92
2. Méthode de résolution énergétique On se propose dans cette section de reprendre la résolution du problème d’évolution élastoplastique précédent, en s’appuyant sur un principe de minimum de l’énergie que l’on établit préalablement dans le cas général de structures planes chargées dans leur plan. 2.1. Principe de minimum en contrainte Considérant un système de barres en flexion, noté L, on se place pour simplifier1 dans la situation où : les données en déplacements sont nulles (appuis fixes, encastrements,..) ; les données en efforts dépendant d’un seul paramètre de chargement noté Q ; la structure est supposée une fois hyperstatique, et l’on désigne par Y l’inconnue hyperstatique. Les barres ont un comportement élastique parfaitement plastique de sorte que, l’état initial du système étant naturel, la déformation de courbure en un point quelconque repéré par son abscisse s, s’écrit : M (s) (3.32) ( s) p ( s) ( EI )(s ) où p est la courbure plastique, M le moment fléchissant et EI le module de rigidité à la flexion. On suppose que cette structure a subi une évolution élastoplastique au terme de laquelle on désigne par Q la valeur du paramètre de chargement, q la valeur correspondante du déplacement généralisé, p la distribution de courbure élastoplastique engendrée par le chargement, et Y la valeur de l’inconnue hyperstatique. Désignant alors par (Q’,Y’) un couple de valeurs quelconques du paramètre de chargement et de l’inconnue hyperstatique, on introduit la fonction quadratique suivante : G (Q',Y ') M (Q',Y ') 2 F (Q',Y ') p M (Q',Y ') ds Q'q (3.33) 2 EI L où M (Q' , Y ' ) désigne la distribution de moments fléchissants en équilibre avec (Q’,Y’). Nous allons établir que le couple solution (Q,Y) réalise, à q et p fixés, le minimum de cette fonction quadratique.
1
Ces hypothèses simplificatrices ne nuisent pas à la généralisation des résultats présentés.
93
q et p fixés F (Q,Y ) MinF (Q ',Y ')
(3.34)
( X ',Q ')
Cette propriété est aisément démontrable. Il suffit pour cela de calculer la différence : F (Q',Y ') F (Q,Y ) M 2 (Q',Y ') M 2 (Q,Y ) p M (Q',Y ') M (Q,Y ) ds (Q'Q)q L 2 EI
(3.35)
soit en tenant compte de l’inégalité : M 2 (Q',Y ') M 2 (Q,Y ) M (Q,Y ) 2 M (Q',Y ') M 2 (Q,Y ) 2 EI EI
(3.36)
et de la loi de comportement (3.32) : M (Q, Y ) F (Q ' , Y ' ) F (Q, Y ) p M (Q' , Y ' ) M (Q, Y ) ds (Q'Q)q EI L M (Q ' , Y ' ) M (Q, Y ) ds (Q'Q)q
(3.37)
L
Or (s ) étant cinématiquement admissible avec q (car solution du problème d’évolution), et la distribution de moments fléchissants M (Q',Y ') M (Q,Y ) étant statiquement admissible avec Q 'Q , l’application du théorème des travaux virtuels conduit à la nullité du membre de droite de (3.37). D’où le principe de minimum énoncé (3.37), qui se traduit par l’annulation des dérivées partielles : G F Y ' Q, Y Y ' Q, Y 0 F Q, Y 0 q G Q, Y Q' Y '
(a)
(3.38) (b)
Dans le cas d’une évolution purement élastique, pour laquelle p 0 , la fonction G n’est autre que l’énergie complémentaire, et l’équation (3.38(a)) le principe du minimum en contrainte (ou théorème du potentiel minimum), tandis que la seconde équation constitue le théorème de Castigliano relatif aux structures élastiques. Dans le cas général, où la distribution de courbure p est de nature anélastique (plastique, mais aussi par exemple thermique, etc.), l’équation (3.38(a)) est désignée sous l’appellation de théorème de Colonnetti.
94
2.2. Retour sur l’exemple de la poutre-console Dans l’exemple de la poutre traité au début de ce chapitre, l’ensemble des distributions de moments fléchissants statiquement admissibles pour le problème est de la forme (3.1), c’est-àdire paramétré par l’inconnue hyperstatique Y. Le calcul de la fonctionnelle G donne alors : G (Q';Y ')
2l
l
l3 8Y '2 Q'2 5Y 'Q'Y ' p ( x)2l x dx Q' p ( x)l x dx 6 EI z 0 0
(3.39)
Le principe du minimum en contrainte établi au paragraphe précédent est alors appliqué aux différentes phases d’évolution du système.
Phase élastique.
Dans cette phase p ( x) 0 , et les équations (3.38) donnent immédiatement compte tenu de (3.39) : G Q,Y 0 Y
Y
5Q 16
(3.40)
ainsi que (théorème de Castigliano) : G q Q,Y YQ'
l3 7Ql 3 q (2Q 5Y ) 6 EI z 96EI
(3.41)
Phase élastoplastique.
Le champ de déformation plastique, correspondant à la formation d’une rotule plastique à l’encastrement, est de la forme
p ( x) p 0 ( x)
(3.42)
d’où : G (Q',Y ')
et par suite
l3 8Y ' 2 Q' 2 5Y 'Q' (2Y 'Q')l p 6 EI z
3 G Q, Y l 16Y 5Q 2l p 0 Y ' 6 EI z 3 G Q, Y l 2Q 5Y l p q Q' 6 EI z
95
(3.43)
(a)
(3.44) (b)
L’équation (3.44(a)) combinée avec le fait que M ( x 0) l 2Y (Q) Q M l (hypothèse de plastification en flexion négative à l’encastrement) permet alors de retrouver l’expression (3.18) de la rotation plastique : l2 8M l / 3l Q p (3.45) 4 EI z Tenant compte de ce résultat, l’équation (3.44(b)) fournit quant à elle l’équation de la courbe donnant le déplacement en fonction de la charge en phase élastoplastique : q
3 2 G Q, Y l 2Q 5Y l p l Ql / 6 M l / 4 Q' 6 EI z EI z
(3.46)
Charge limite et écoulement plastique libre.
Le champ de déformation plastique correspond à la formation de deux rotules plastiques repectivement localisées en O et A. Désignant par p et p les dicontinuités de rotation plastiques en ces points, le champ de courbure plastique peut s’écritre :
p ( x) p 0 ( x) p l ( x)
(3.47)
où l (x) désigne la distribution de Dirac au point A(x=l), de sorte que la fonctionnelle à minimiser a pour expression : l3 8Y '2 Q'2 5Y 'Q' (2Y 'Q')l p Y 'l p G (Q',Y ') 6 EI z
(3.48)
d’où par application du principe de minimum (3.38) : 3 G Q, Y l 16Y 5Q 2l p l p 0 Y ' 6 EI z 3 G Q, Y l 2Q 5Y l p q Q ' 6 EI z
(a)
(3.49) (b)
La première équation donne puisque Q Q l 3M l / l et Y M l / l : M ll 2 p 2 p 6 EI z p
p
(3.50)
qui représente l’équation de compatibilité géométrique, reliant les taux de rotations plastiques. La seconde équation conduit à l’expression du déplacement de la charge en phase d’écoulement plastique, en fonction de de la discontinuité de rotation plastique p 0 qui demeure arbitraire :
96
q l p
M ll 2 q l p 0 6EI z
*************
97
(3.51)